| DR650SEに流れるウィンカー(自作)を装着 (2017年6月〜2018年5月) 「流れるウィンカー」は、英語で "Sequential Turn Signal" と言うそうです。 トラックなどに昔から装着されていましたが、最近、車検でも認められるように なったので、自作してみました。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
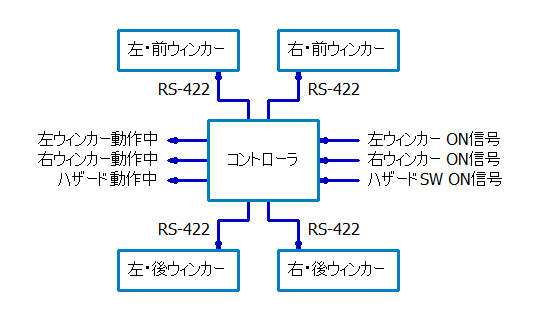
| こんな構成でいきます。 個々のウィンカーにマイコンを搭載します。マイコンは全部で5個使うことになります。 ウィンカーは、コントローラのコマンドを受信して、その通りの動作をします。 ウィンカーとコントローラは、RS-422の平衡信号線と電源線の合計4線で接続されます。 電源線には最大で0.4A程度しか流れないので、細い線で充分です。 非同期通信は、送信側と受信側のマイコンのクロックがマイコン内蔵のCR発振に よるものなので、ボーレートを厳密に決めることができません(一応8MHzで発振しますが マイコン毎にバラつきますし、温度などでも変わります)。 そこで、送信するデータのLSBを必ずHighとして、スタートビットの長さを受信側で 測定することで送信側のボーレートを測定、受信側でボーレートを可変して送信側と 同期を取ることにしました。 コントローラからは3本の状態表示用の信号が出力されます(オープンコレクタ出力)。 入力と出力が3本ずつ同じに見えますが、ウィンカーがONの状態でハザードONに なればハザード動作します(ハザード動作が優先します)し、ハザードSWはオルタネート式 ではなくモーメンタリ式のSWにするのです。DRにはハザードSWが付いていないので 別途防水タイプのSWを増設する予定なのですが、オルタネート式の防水SWはロック機能を 設けるためか外形が大きくなるので、モーメンタリ式にした方が好都合です。価格も安いです。 そういうわけで、入力と出力はコントローラ側で優先順位を付けて動作が異なる 場合があるので、コントローラから別途出力することにします。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
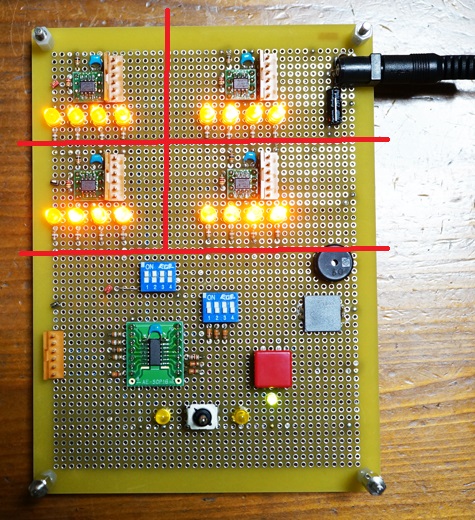
| 試作・実験回路です。上側にウィンカー4回路、下側がコントローラです。 全部でマイコンが5個載っています。 RS422インターフェースは無く、マイコン同士を直結しています。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| いつものように、ALLアセンブラでソフトを書きました。 ウィンカー側がちょうど600バイト、コントローラ側が814バイトと コンパクトなプログラムです。 アセンブラで書くとコンパクトになるのでうっとりします(変態チックですね〜)。 うまく動作するようになりましたので、基板化します。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
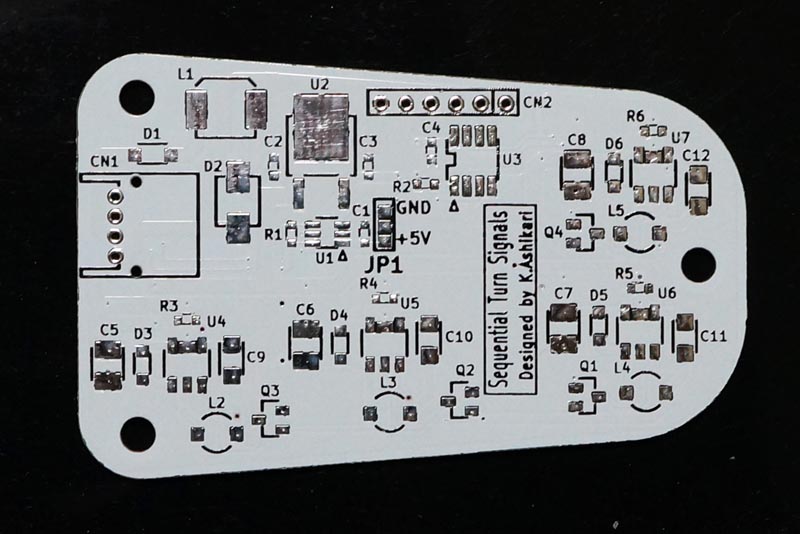
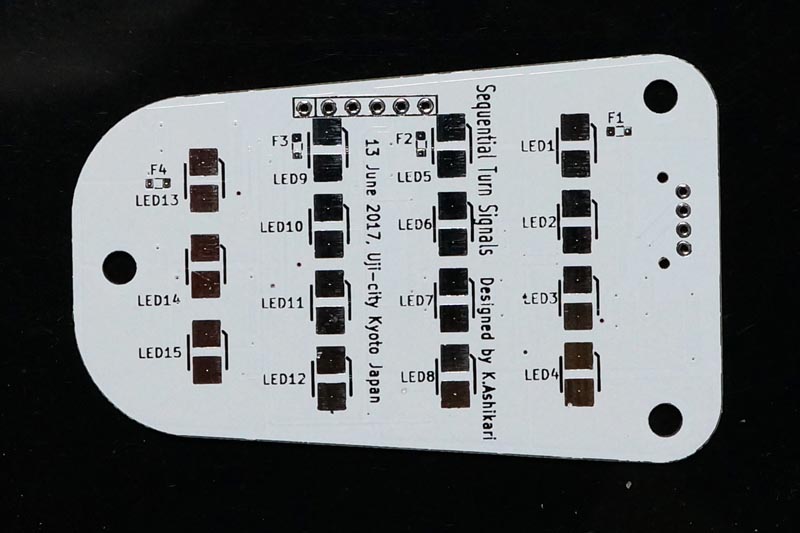
| DR650のウィンカーボディにすっぽり収まるような形の基板を作りました。 これは裏側(光らない面)です。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| この面が光ります。 光を反射するようにレジストは白色にしました。 全面にLEDが付きます。あと、安全のためFUSEを1列毎に入れてあります。 テールランプのLED化とほぼ同じ回路ですが、ウィンカーボディの形状のため、 左端の列だけLEDが3個になっています(他の3列は4個)。 全部で15個のLEDが付きます。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| 部品実装前に、試しに仮止めしてみました。 ぴったりの大きさです。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
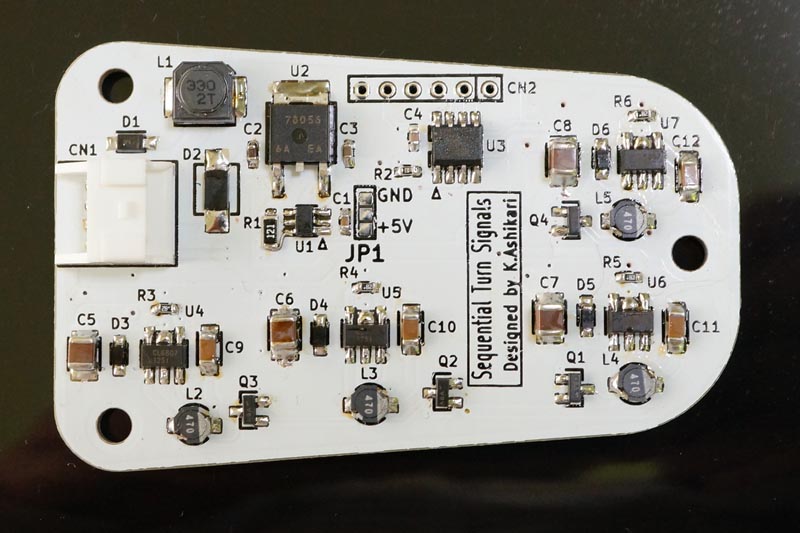
| 部品を実装したところです。 U3がマイコン(ATTiny25)です。 U1がRS-422のレシーバです。 R1(120Ω)で終端しています。 この抵抗は0.1Wぐらい喰うので3216サイズ(3.2mm×1.6mm)なのですが、 基板設計時にミスって2012サイズ(2.0mm×1.2mm)でパターンを作ってしまいました。 実際の部品の方が大きくハンダが片側にしかできないので 片側は直接レシーバICの足にジャンパー線で繋いでいます。 それ以外の大半がLEDの定電流ドライブ回路です。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
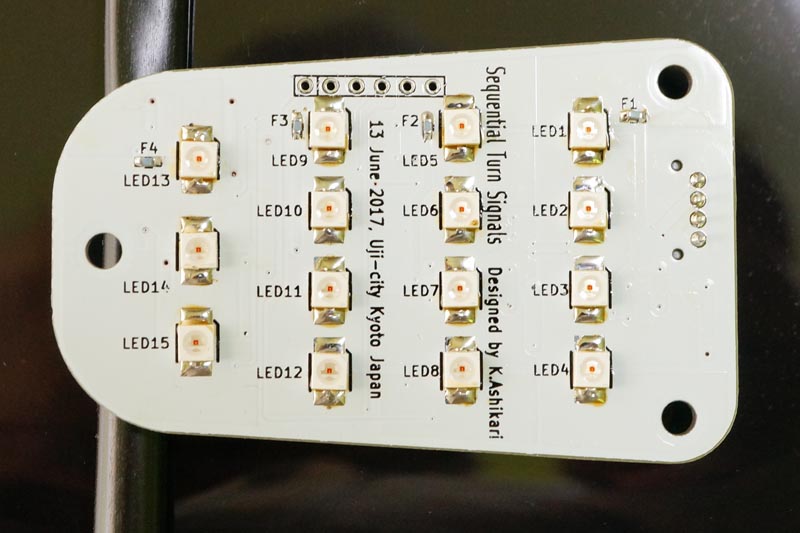
| こちらが光る面で、LEDを実装してあります。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
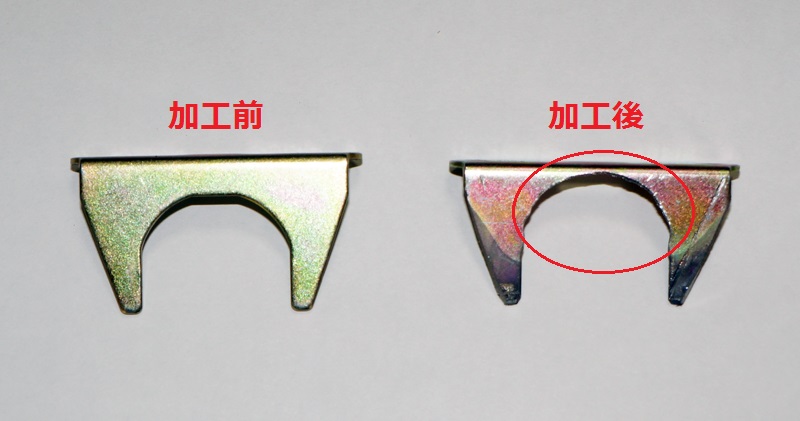
| ウィンカーボディとステーを止めてある金具(ラッチ)です。 基板はウィンカーボディとウィンカーレンズの間に挟み込むように 取り付けるので、基板の厚み分、なるべく深く差し込むために加工しました。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
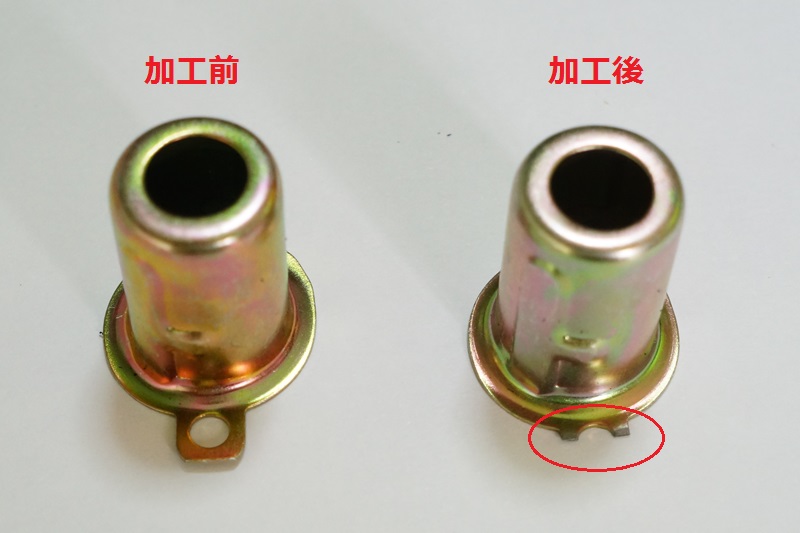
| これは電球をはめこむ金具ですが、ウィンカーのステーの強度を保つために必要です。 出っ張りを削りました。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| ウィンカーボディをウィンカーレンズを接続するネジの支柱部分も削ります。 ウィンカーレンズ側のネジの支柱部分も削りました。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| こんな感じで電動リューターでガリガリやりました。 電動リューターを買っておいて良かったです。手でやってたら日が暮れるところでした。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| ようやく基板がウィンカーボディにはまりました。 前後左右4個のウィンカーボディを加工するのに丸1日かかりました。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
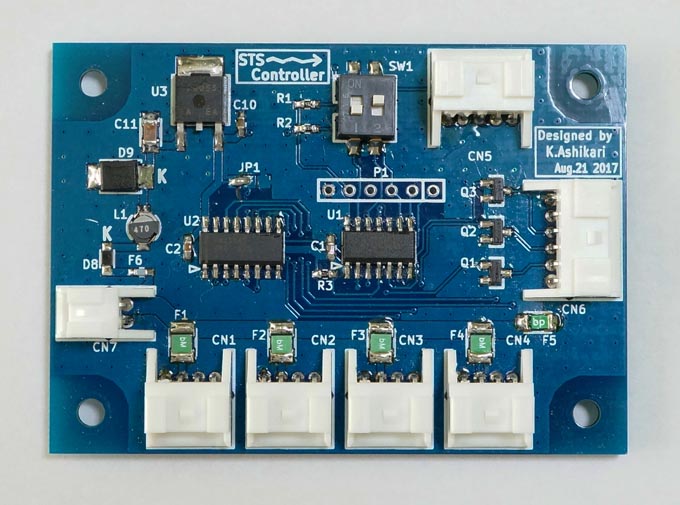
| これは4個のウィンカーを制御するユニットです。ウィンカーリレーに相当するものですが 「リレー」と言うには複雑過ぎるものですので「コントローラ」と言うべきですね。 コネクタだらけです。 基板は70mm×50mmの大きさです。 中央のU1がマイコン(ATTiny441)です。 その左側のU2はRS-422のトランスミッター(4ch)です。 4chありますが、トランスミッターの入力4線は接続されていて 4ch別々にコマンドが送出されるわけではありません。 同時に同じコマンドが4つに分かれて送出されます。 4個のウィンカーユニットは全く同じコマンドを受信します。 ウィンカーが受け取るコマンドは 1. 1列だけLEDを点灯させる。 2. 2列のLEDを点灯させる。 3. 3列のLEDを点灯させる。 4. 4列のLEDを点灯させる(フル発光)。 5. LEDを全て消灯させる。 6. 4列のLEDを20%の光量で点灯させる。 7. 自己認識させる。 があります。 この7種類のコマンドを4個のウィンカーに送信します。 7種類のコマンドをコントローラから4個のウィンカーに送信することで、 「流れるウィンカー」の動作の他に、 「ハザード動作」・「前側2個のウィンカーを車幅灯として動作」 できます。 また、個々のウィンカーユニットが「前の左」・「前の右」・「後ろの左」・「後ろの右」の どれであるかを認識させる機能があります。 コントローラのコマンドは4個のワインカーに一斉送信しますので、 個々のウィンカーは自分用のコマンドなのか、そうでないかを把握しています。 自分用のコマンドでない時は無視して何もしません。 例えば、左側にウィンカーを出す時は 1. 「前の左」・「前の右」・「後ろの左」・「後ろの右」 は全消灯しろ 2. 「前の左」・「後ろの左」の1列を点灯しろ 3. 「前の左」・「後ろの左」の2列を点灯しろ 4. 「前の左」・「後ろの左」の3列を点灯しろ 5. 「前の左」・「後ろの左」の4列を点灯しろ 6. 2.に戻る という風にコマンドを出します。 (コマンドは常に4個のウィンカーユニットが受信しています)。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
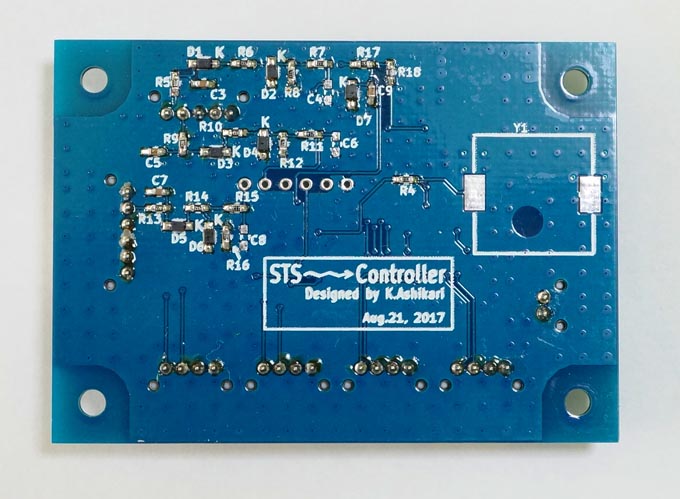
| これが裏側です。シルク印刷がややボケています。 写真を撮る時に手ブレしたのではありません。 "Made in China"の品質ですね。 5枚で US $5 という安さなのでしょうがないです。 パターンの途切れやショートはなく、実用上の問題はありません。 この面は、ウィンカーSW(Lerf/Right)、ハザードSWの入力回路(3入力)です。 誤動作しないように割と厳重にフィルタリングしています。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
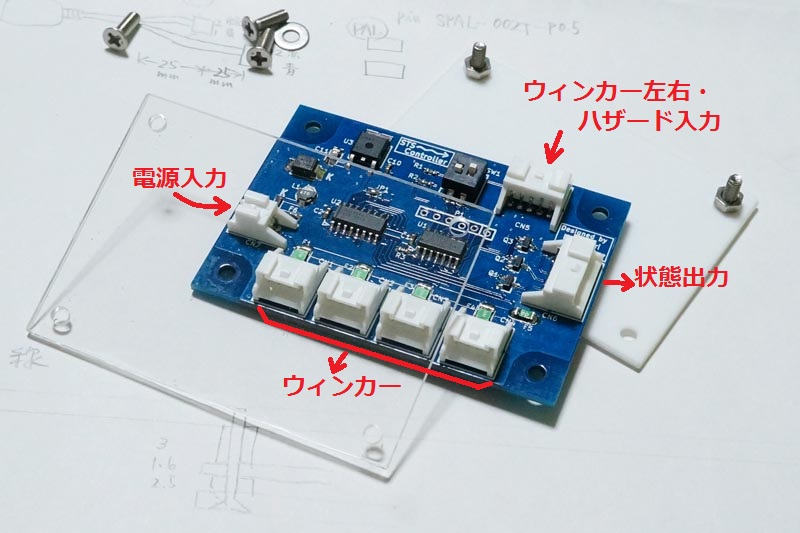
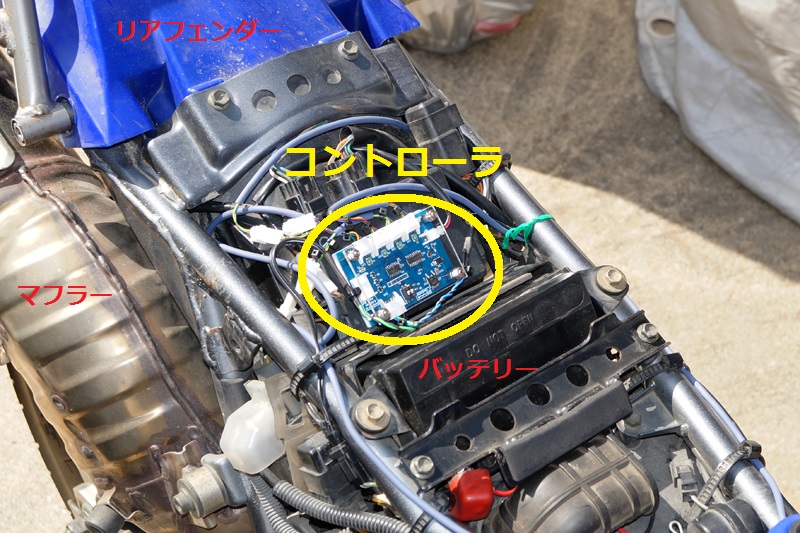
| コントローラの上下にアクリル板を付けて保護しておきます。 全く防水ではありません。 シート下のCDIユニットの上に両面テープで固定します。 上側のアクリル板は透明にしてみました(白いと基板が見えなくてさびしいので)。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
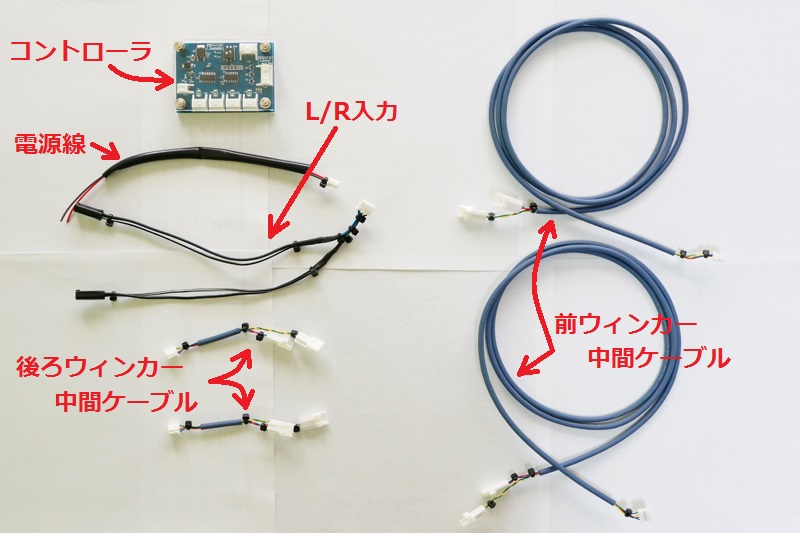
| これが新たに作ったハーネスです。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| こんな感じです。 点滅の時間はいろいろやってみて、
1分間に70回の周期 が良さそうでした。 これはコントローラ側でコマンド送出後の待ち時間を変えることで変更できます。 4個のウィンカーは、コントローラの指示にただ従うだけです。 全て動いたので、さあ、車体に取り付けましょう。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| コントローラはCDIユニットの上に両面テープでくっつけました。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| 快晴の昼間に点灯させています。 ヘッドライト(H4)と比較しても充分な光量があると思います。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| これがリアビュウ。 ウィンカーレンズ・ウィンカーボディはUSA製の社外品です。純正品と互換のあるものです。 ウィンカーレンズは白色半透明にしました。この方が流れる感じがよくわかると思ったのです。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| ハザード動作させています。 |
|||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||
| こちらは、 全消灯→車幅灯→全ON を繰り返してみました。 実はハザードSWを押しながら電源ONすると、デモンストレーションモードに なるのでした。 |
|||||||||||||||||||||||||||||
2017年の6月頃から設計、基板を作り始め、お盆の頃にはウィンカー部・コントローラ部が できあがり、さあ、双方を繋いで動作確認のための配線をしようと思ったら、、、 コネクタの圧着がうまくできません。 コントローラはコネクタだらけになるので、コントローラ基板を小さくするために コネクタのピッチ1mmの超小型のコネクタ(JSTのNSHコネクタ)を採用したのが失敗でした。 ピッチ2mmのコネクタ(JSTのPAコネクタ)に変更し、基板を作り直しました。 そうこうしているうちに秋がやって来て、ツーリングに出かけたり、DR-Z400の ジェネレータが壊れて修理したりしているうちに冬が来てしまいました。 やっと春が来て、再開しました。 結局、ほぼ1年間の気の長い開発となりました。 【消費電力の計算】 ウィンカー動作時は以下のとおり。
平均すると 0.142A 14Vで1.98W、2灯で4W程度。 ノーマルだと21Wのランプが2灯、DUTY=50% として、21W。 1/5程度になりました。 車幅灯として動作時は 4列動作 0.3A で、DUTY=20%なので 0.06A。 14Vで0.84W 2灯で1.7W程度。 テールランプもLED化していて、0.9W。 合計で、2.6W。 ノーマルのテールルランプは5W。 約半分で済んでいます。 このウィンカーでユーザー車検を受けましたが、何の指摘もありませんでした。 【2018年9月27日 追記】 |
|||||||||||||||||||||||||||||